


NaN / 0
Autosali IOT Vehicle Tracker Fleet Management System Tracker Gps Locator Anti Theft OBD Tracker for Car Telematics
Get Latest Price
US$ 14
≥100 Pieces
US$ 13
≥500 Pieces
US$ 12
≥1000 Pieces
US$ 9
≥3000 Pieces
Quick Details
Positioning Mode:
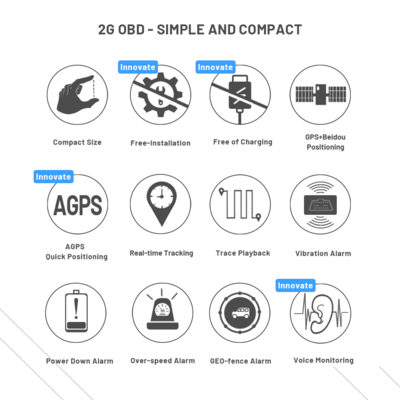
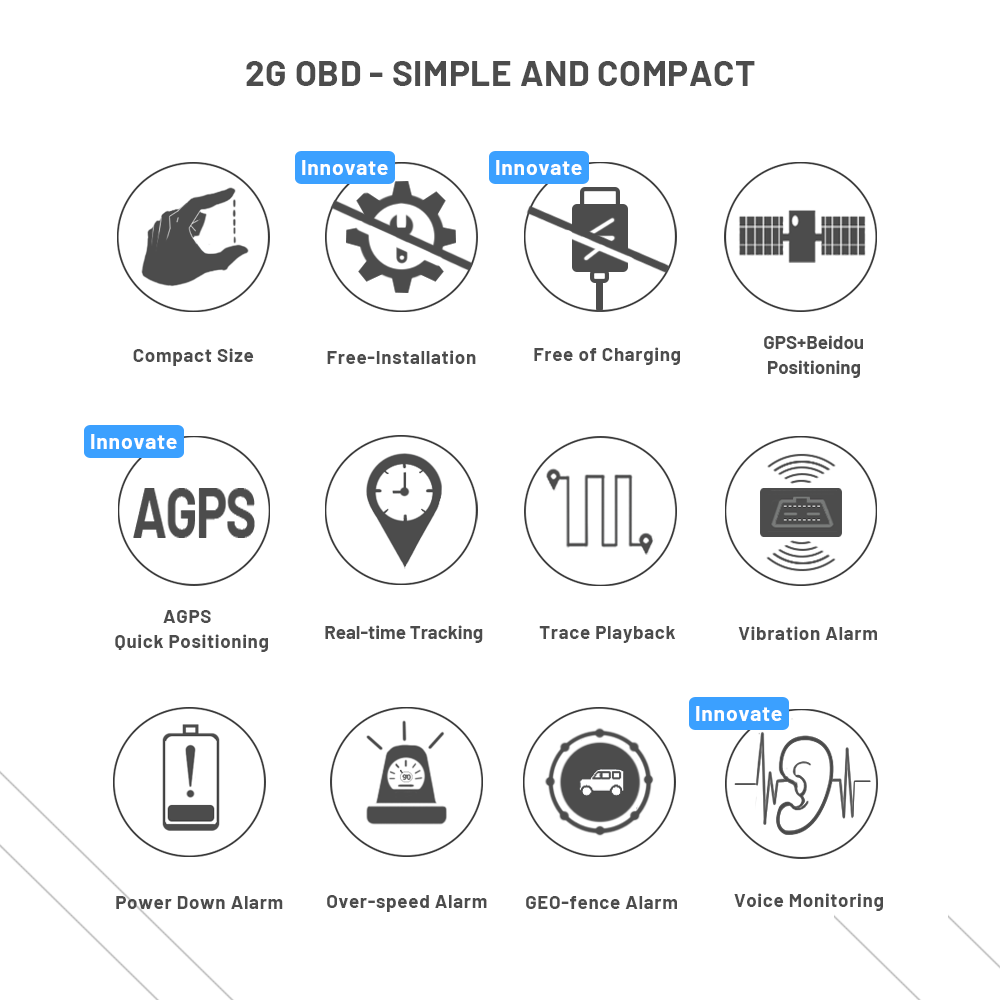
GSM, GPS, LBS, AGPS, Beidou, Real-Time Positioning
Function:
Over-Speed Warning, Wheel Path Playback, Geofence
Data Storage:
Cloud Storage
Warranty:
1 YEAR
Product Details
Products Description
|
Parameter
|
|
|
|
|||
|
Category
|
Specifications
|
|
|
|||
|
Working Voltage
|
DC 9V-36V
|
|
|
|||
|
Working Current
|
22mA @12V
12mA @24V |
|
|
|||
|
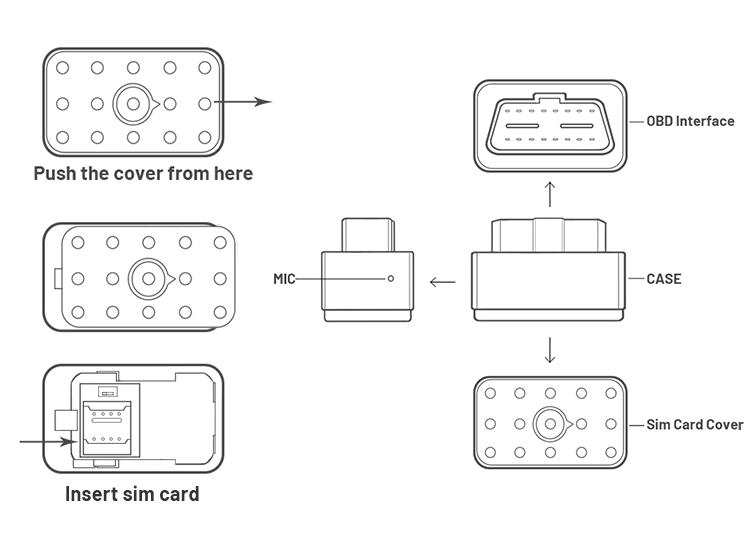
Standard Sizes
|
51mm(L)*30.6mm(W)*29.5mm(H)
|
|
|
|||
|
Net Weight
|
40g
|
|
|
|||
|
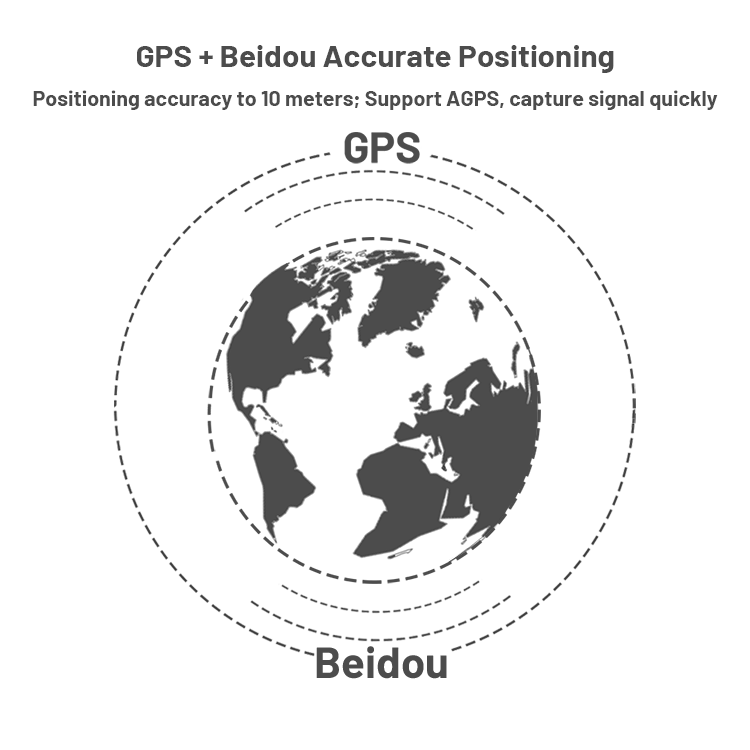
Positioning Mode
|
GPS + Beidou
|
|
|
|||
|
Positioning Accuracy
|
10 Meters (Test Data)
|
|
|
|||
|
Communication Network
|
GPRS
|
|
|
|||
|
Communication Way
|
TCP
|
|
|
|||
|
Start Time
|
Cold: 38s
Warm: 28s Hot: 2s |
|
|
|||
|
Working Temperature
|
-20℃~ +70℃
|
|
|
|||
|
Humidity
|
20%-80%RH
|
|
|
|||
|
Standby Battery
|
1 hour(100mA/h)
|
|
|
|||
|
Warranty
|
1 Year
|
|
|
|||
|
Function
|
|
|
|
|||
|
Functions
|
Description
|
|
|
|||
|
Real-time Tracking
|
Upload the longitude and latitude information according to the time interval
|
|
|
|||
|
AGPS
|
Support AGPS, Capture signal quickly
|
|
|
|||
|
Power Down Alarm
|
When the power supply of the device is disconnected, an alarm is triggered
|
|
|
|||
|
Low Power Alarm
|
Set the number of volts below the external power supply voltage through SMS command, and alarm the center number; Voltage range is 7 ~45, 0 means the function is off
|
|
|
|||
|
Over Speed Alarm
|
When vehicle is over speed, device will upload an alarm to the server
|
|
|
|||
|
GEO-fence Alarm
|
Support GEO fence settings, vehicles entering and leaving the fence trigger an alarm
|
|
|
|||
|
Voice Monitoring
|
Support remote monitoring, control switch and monitoring time through SMS commands
|
|
|
|||
|
Vibration Alarm
|
Support device vibration alarm, control switch and vibration sensitivity through SMS commands
|
|
|
|||
|
Anti-dismantle Alarm
|
Support anti-dismantle alarm, equipment removal, trigger alarm, the function is the same as power down alarm
|
|
|
|||
|
Blind Area Data Updating
|
The data is stored up to 300pcs. if the terminal is located and not online,upload this data when the signal is good
|
|
|
|||
|
EPO Assisted Positioning
|
The terminal supports the EPO assisted positioning function to enhance the positioning effect
|
|
|
|||
|
Inflection Data Updating
|
When the angle of the vehicle turns is more than a certain angle, the device will upload a position information to the platform to optimize the trajectory
|
|
|
|||
Details Images


Related Products
30%









Hot Searches